在追求更高层次智能化和自动化工业运营的竞争中,每一微秒都至关重要。为满足机器人、包装、半导体等行业日益增长的精度、速度及同步性需求,EtherCAT 已成为高性能运动控制领域的技术标准。其独特的“即时处理”机制可实现高速确定性通信,这是传统工业以太网协议难以企及的优势。
不过,这些优势您或许早已了解,也很可能是您在关键应用中将 EtherCAT 作为首选的原因。然而,随着工业系统日趋复杂,最常见的网络拓扑结构中存在的隐性漏洞可能正威胁着您的运营安全。
链条中的薄弱环节
为追求简单和经济高效,许多 EtherCAT 网络采用菊花链(或线性)拓扑结构。在这种拓扑结构中,多台设备以简单的线性方式相互连接。尽管该设计有诸多优点,却存在一个致命的单点故障隐患。
可以将其想象为一连串相连的延长线:如果拔掉其中一条,后面的延长线就会断电。在工业环境中,各种情况都可能发生,例如链路中某个节点故障、电缆受损或某处连接断开。这些情况一旦发生,链路中所有下游设备将立即与主控端断联。这可能导致生产线某一段完全瘫痪,进而造成产能损失和高额停机成本,并增加故障排查的复杂度。随着链路中设备数量的增加,这类风险也会随之上升。
从脆弱链条到韧性网络架构
那么,如何才能突破最简单却最脆弱的拓扑结构限制,充分发挥 EtherCAT 技术优势?答案在于——采用不同的拓扑结构来构建更具韧性的网络架构。EtherCAT 技术支持多种拓扑结构,包括树型和星型。下文将探讨这些拓扑结构如何助力构建更稳固的 EtherCAT 网络。
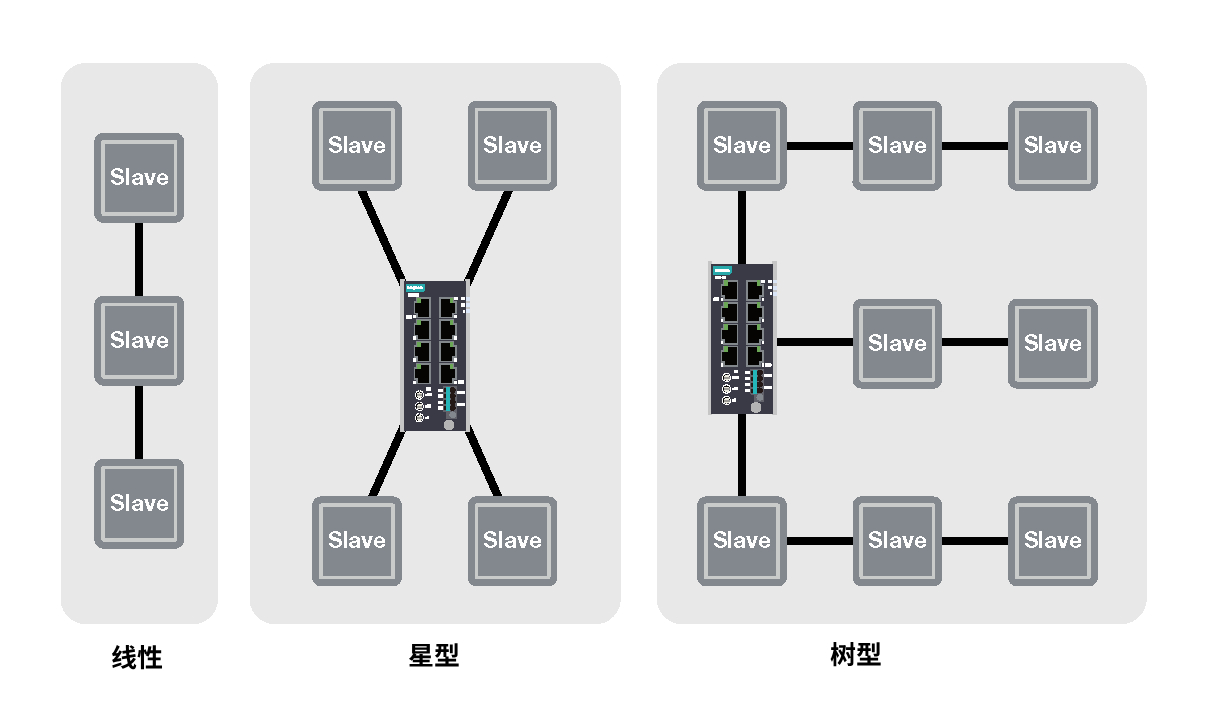
不同于单一线性结构,树型拓扑结构以 EtherCAT 分支器作为分叉点。主控端连接至一个分支节点,而该节点配备多个分支端口。每个端口均可连接一台从站设备,或连接至其自身的小型菊花链分区(即分支),后者更为常见。由此形成类似树状的结构:主控端如同树根,分支器为主干,而设备分区则构成较小的枝桠。相比之下,星型拓扑是树型拓扑的简化版本,仅包含一个分支层级。如果某一分支中的设备或电缆发生故障,其他分支不会受到影响。这种灵活的拓扑设计具有三大直接优势:
- 故障隔离:故障被限制在单一分区内,避免整个拓扑结构的灾难性瘫痪。
- 简化故障排查:技术人员能迅速定位故障所在具体分区,大幅缩短平均修复时间 (MTTR)。
- 灵活扩展:无需中断现有网络,即可通过新增设备或整机模块进一步扩展拓扑结构。
行业挑战
以半导体和锂离子电池制造两大实际应用场景为例,两者均依赖 EtherCAT 技术实现实时运动控制与精密生产。此类高敏感度应用无法承受系统停机风险,必须建立可靠连接,确保 EtherCAT 持续无缝通信。
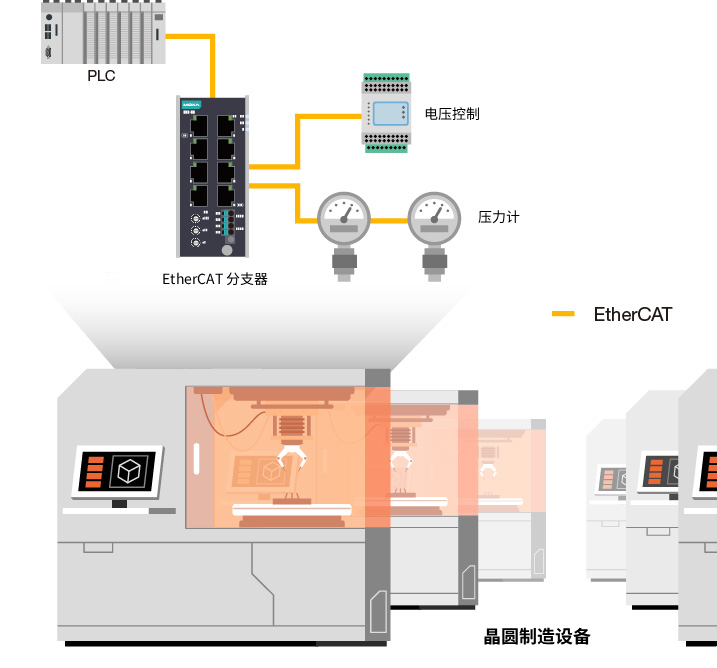
半导体设备制造
在半导体制造业中,EtherCAT 协议正成为主流技术。以等离子体增强化学气相沉积 (PECVD) 设备为例,在空间受限且嘈杂的环境中新增设备往往颇具挑战性。新设备还需与多个传感器、压力表和电力控制装置连接。因此,设备制造商需采用抗干扰性能优越且兼顾未来扩展能力的多端口紧凑型 EtherCAT 产品。
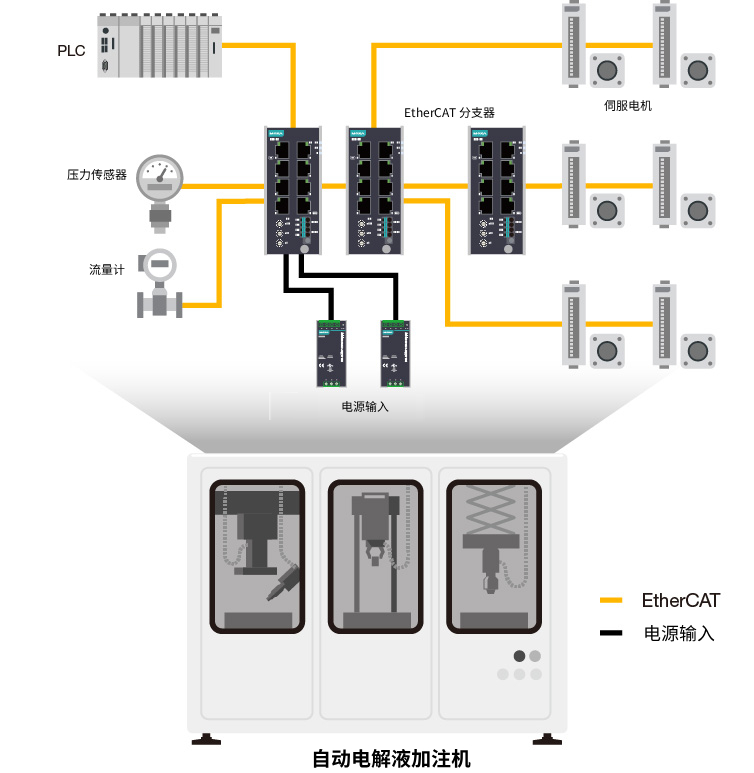
锂离子电池制造
在锂离子电池制造设备中,将数百台 EtherCAT 从设备划分为多个网络分区的情况并不罕见。与此同时,制造商需确保在电力中断或系统不稳定时,各项操作仍能正常运行。由于制造商通常采用不同厂商的 EtherCAT 设备,设备间的互操作性成为另一关键考量。因此,评估并选择那些经过测试、可兼容不同厂商 EtherCAT 设备的产品,对确保这些设备无缝集成至现有拓扑结构至关重要。
可靠性设计
建立稳固且灵活的拓扑结构需要专为工业边缘设计的硬件。Moxa 的 EJS 系列工业级 EtherCAT 分支器旨在成为高性能网络的核心组件。强固紧凑的 EJS 系列具备构建高适应韧性 EtherCAT 网络架构所需的灵活性,可满足现代自动化要求,最大限度确保系统运行时长和稳定性。
准备好强化您的 EtherCAT 网络了吗?
若您正采用 EtherCAT 菊花链拓扑结构,了解如何规避其固有风险,将是迈向卓越运营的下一个关键动作。Moxa 最新版技术说明介绍了如何识别潜在故障点,并借助 EtherCAT 分支器构建更稳固的网络架构。在此处下载技术说明: